Autonomous Swarm/Multi-robot systems & Human-in-the-loop
|
My research on robotics focuses on the distributed control of autonomous multi-robot and swarm systems, and on the interaction and communication between humans and swarm/multi-robot systems. The general aim is to work towards the creation of mixed human multi-robot teams: robots and humans safely/friendly share common spaces and interact and cooperate in the context of a common mission execution (e.g., a search and rescue operation). Networking and communications also play an important role in my robotic research, since information sharing is essential for coordination and to obtain effective synergies in a (mixed) team.
In the following an overview of research is reported for three areas of interest for swarms and mixed swarms: |


|
In the following an overview of research is reported for three areas of interest for swarms and mixed swarms:
|
|
|
coa jloljksljksjldfhlkjsd llsjljslkdj ;
|
|
Gesture-based interactionThe beginning of our work on gesture-based human-swarm interaction: the focus in on letting the swarm working as an augmented distributed gesture classifier.
|
Interaction with heterogeneous robotsGestures are used for spatial selection and to issue simple spatial commands, both to ground and flying robots. Robot feedback is multi-modal.
|
A full gesture vocabulary + basic grammarA full gesture vocabulary and a basic grammar is built and tested with a relatively large swarm providing an interactive feedback.
|
Multi-modal interaction: voice + gestures + wearables (work in progress)The robot(s) become mainly passive during the interaction, the decoding of the commands is done on board of the human. Speech and gesture are combined to interact with multiple robots. Data from two Myo Armbands are used for the gestures.
|
|
|
Closed-loop system-level planning in heteregenous teams for SARThe Swiss-funded Sinergia project SWARMIX: a mixed team of humans, robots, and dogs interact and cooperate for search and rescue. A team-level planner dynamically assign task to the agents in closed-loop with mission execution.
Adaptive control of mobile relays and routing paths in robotic networksThe position of mobile robots acting as network relays in a mobile ad hoc network is adaptively controlled based on a mathematical model that jointly outputs positions and routing tables.
|
Let's play together with robots!!A robot team and a human coordinate to play together against other robots in evader-pursuer scenario. The robot plays adapting its optimal policy to the fact that its teammate is probably not an optimal player.
Cooperative distributed motion planning using an overhead camera networkA network of ceiling cameras cooperate for distributed path planning and for controlling the path execution of an holonomic robot system (emulated with a pair of e-puck robots connected by a bar). The video shows the planned set of roto-translations and their execution by the robot system.
|
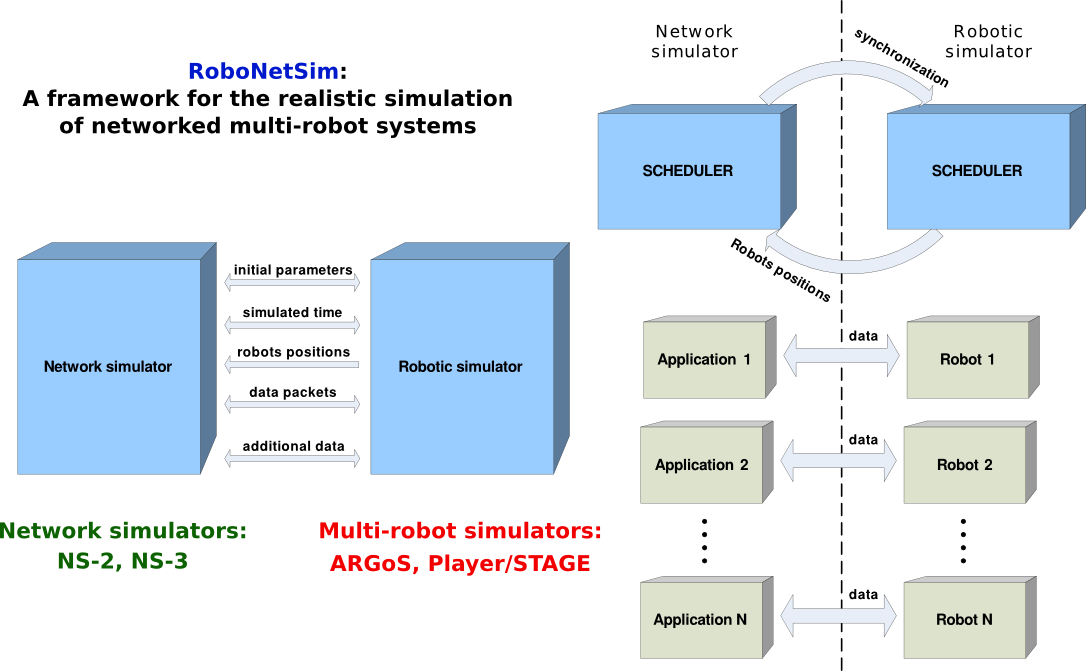
RoboNetSim: Realistic simulation of networked multi-robot systems
A general framework is developed to interface multi-robot and network simulators, and make them running in parallel synchronizing with each other. Follow the link on the image to download the software and interface ARGoS and Player/STAGE with NS-2 and NS-3, and run realistic simulations of networked multi-robot systems!
|
Swarmanoid, the movie
Ground, grasping, and flying robots tightly cooperate to create a
swarmanoid, a heterogeneous robot swarm working on a common mission. |
|
|
Self-organized pattern formation in robot swarm navigationAll robots need to move back and forth between two static target robots. They help each other by message exchanging. A stable double chain is formed. The behavior is robust to removal/addition of robots and to the change of target locations. Rapdidly scroll the video by hand and you will see some nice adaptive pattern formation over time
Human-inspired robot navigation:
|
Human-inspired robot navigationWe want robots being able to move in the environment in a way which is safe, effective, and socially acceptable. In order to achieve these goals, we started from a work of G. Theraulaz and his collaborators about the identification of the rules that determine the walking behavior of pedestrian social groups and we have ported and adapted these rules to our robots. A number of interesting collective behaviors emerge...
Deep neural networks for safely flying in a forest following human trailsBased on a smart approach for gathering an automatically labeled training dataset, a deep neural network is effectively trained to classify trail images. In turn, classifications are used to control a quadcotpter, that can safely fly across a forest.
|
Perception of people from a
low-lying viewpoint for robot navigation
Kinect data are used to help a low lying robot to correctly perceive
walking people around it by classifying legs/feet, such that a safe
navigation could be implemented for this class of (common) robots.
walking people around it by classifying legs/feet, such that a safe
navigation could be implemented for this class of (common) robots.