RoboNetSim is a general framework for the seamless integration of network and multi-robot simulators. The goal is to perform realistic simulation of multi-robot systems when the use of wireless communications play an important role, and cannot/should not be simulated in a simplified/incorrect way (e.g., by adding ad hoc components to existing multi-robot simulators or assuming unrealistic disk models)
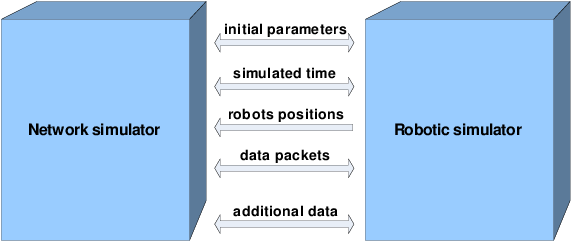
The two simulators run in parallel, as separate processes, using UDP sockets to exchange the information needed to keep an up-to-date view of the running scenario.
|
|
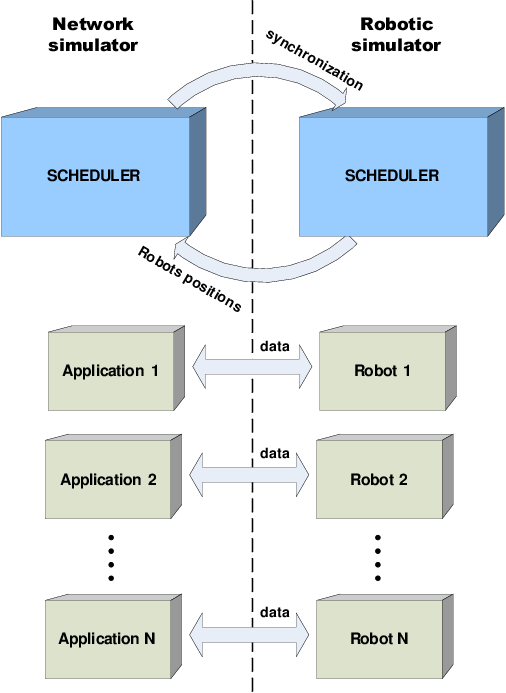
The network and the multi-robot simulator are synchronized their respective schedulers by information exchange.
The multi-robot simulator takes care of robot motion, sensing, and physical interaction among themselves and with the environment. The network simulator takes care of the radio communications among the robots. Each robot has a socket connection to its application layer, which is managed by the network simulator. This also implements multi-hop data routing, when needed. |
The RoboNetSim framework has been applied to interface the following simulators:
|
Network simulators: NS-2, NS-3
|
Multi-Robot simulators: ARGoS, Player/STAGE
|
Software download: Follow this link to download the .zip with all the files and the instructions to install RoboNetSim for interfacing ARGoS or Player/STAGE with NS-3
More details about RoboNetSim can be found in the following two papers:
- M. Kudelski, L. Gambardella, G. A. Di Caro, RoboNetSim: An integrated framework for multi-robot and network simulation, Robotics and Autonomous Systems, Vol. 61, n.5, pp. 483-496, 2013 [DOI] [BibTeX]
- M. Kudelski, M. Cinus, L. Gambardella, G. A. Di Caro, A framework for realistic simulation of networked multi-robot systems, Proceedings of the 25th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, October 7-12, 2012, [BibTeX]